This is the part I of the work that I did for my master thesis (part II). In this work first, I computed HOG (Histogram of oriented gradients) on my images and then sent the computed histogram to a linear SVM (support vector machine). The SVM was trained with human and non-human images. The output of the classifier was abounding box if there was any human in the image.
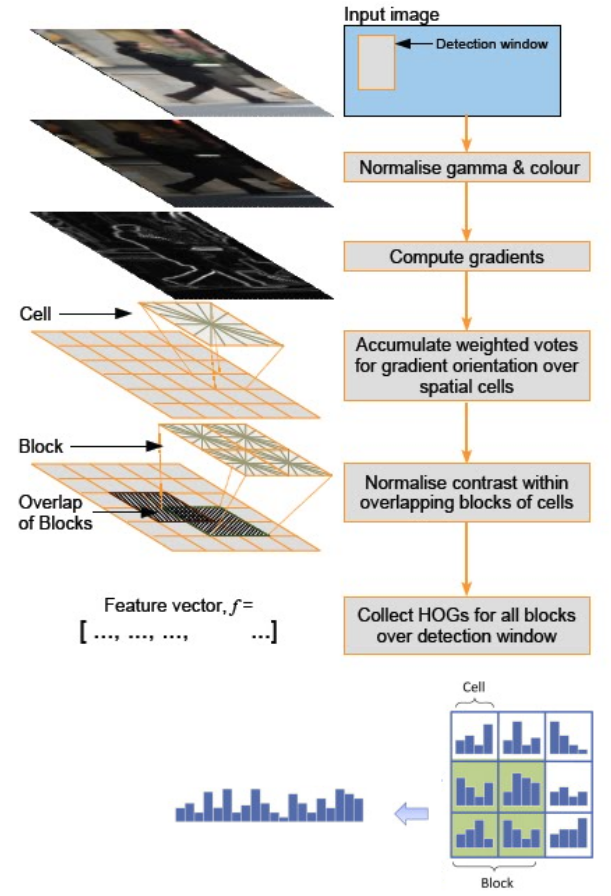
Feature extraction and object detection in HOG, Tiling the detection window in an overlapping grid of HOG descriptors and then using a SVM based window classifier gives the human detection chain. Image acquired from [1].Overview of HOG, The detector window is tiled with a grid of overlapping blocks, Each block contains a grid of spatial cells. For each cell, the weighted vote of image gradients in orientation histogram is accumulated. These 31 are locally normalized and collected into one big feature vector. Images acquired from [2].In the next, I used Kalman filter to track the detected human. To check the accuracy of my work, I created a ground truth based on the color tracker. You can read and download a similar one on my website here.
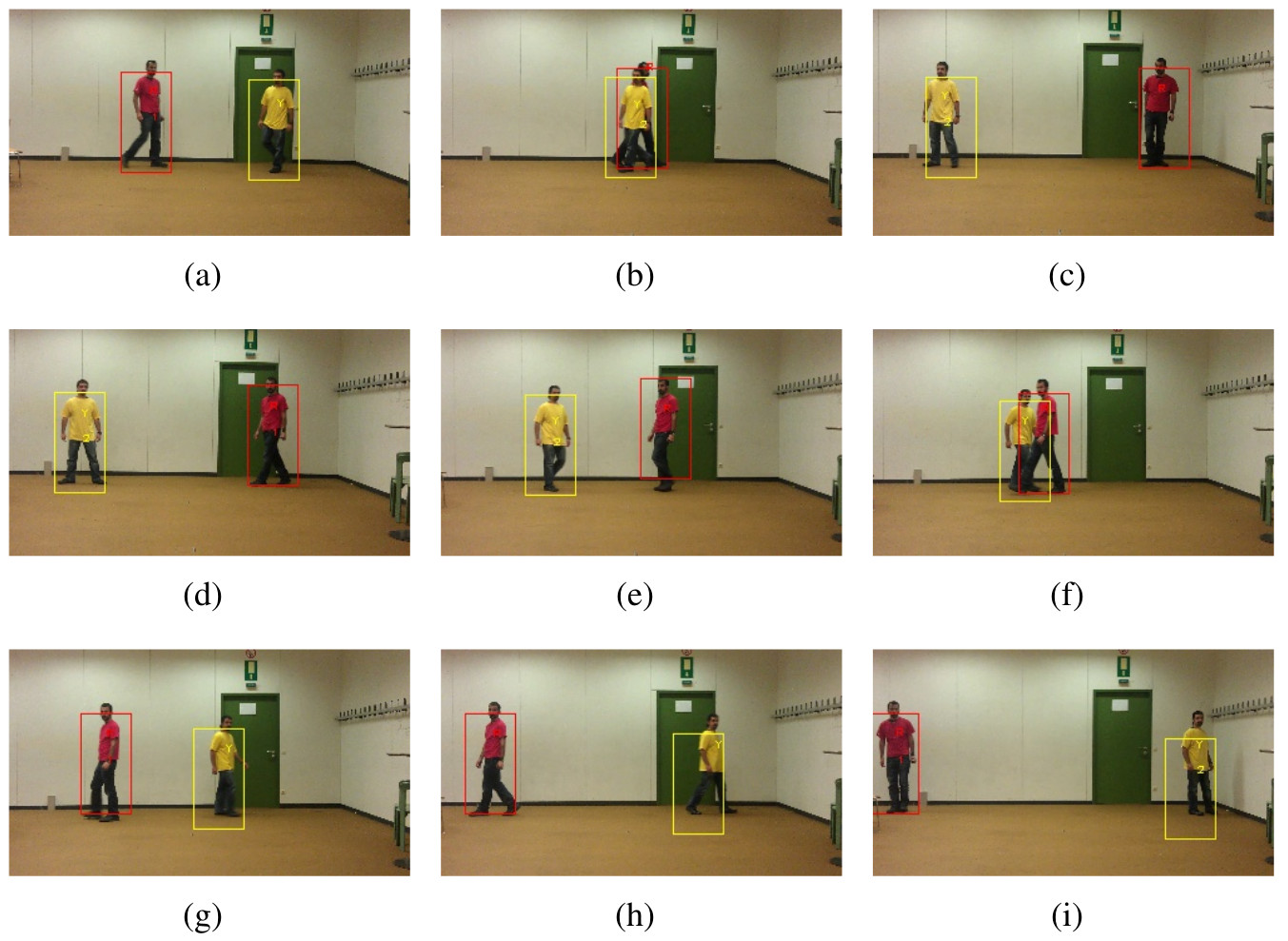
The bounding box shows the Kalman filter prediction while the letter 1 or 2 indicate the human detection by HOG and letter R and Y are locations of the player detected by the color tracker.
All text and images in this article are taken from my master thesis or respective publications, the full document can be downloaded here.
[1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection. In Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer Society Conference on, volume 1, pages 886 –893 vol. 1, June 2005. doi: 10.1109/CVPR.2005.177.
[2] N. Dalal and B . Triggs. Histograms of oriented gradients for human detection., 2005.
[…] work is the second part of my master thesis (part I). In this part, I developed an algorithm for 2D pose estimation of the human body. To do this, I […]
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.



[…] work is the second part of my master thesis (part I). In this part, I developed an algorithm for 2D pose estimation of the human body. To do this, I […]