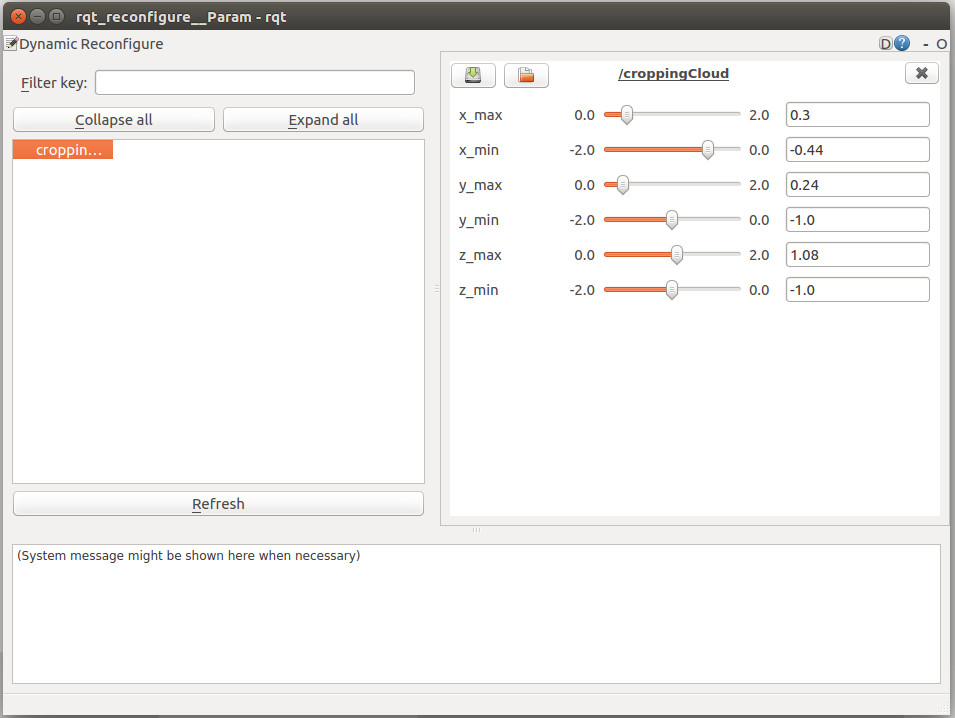
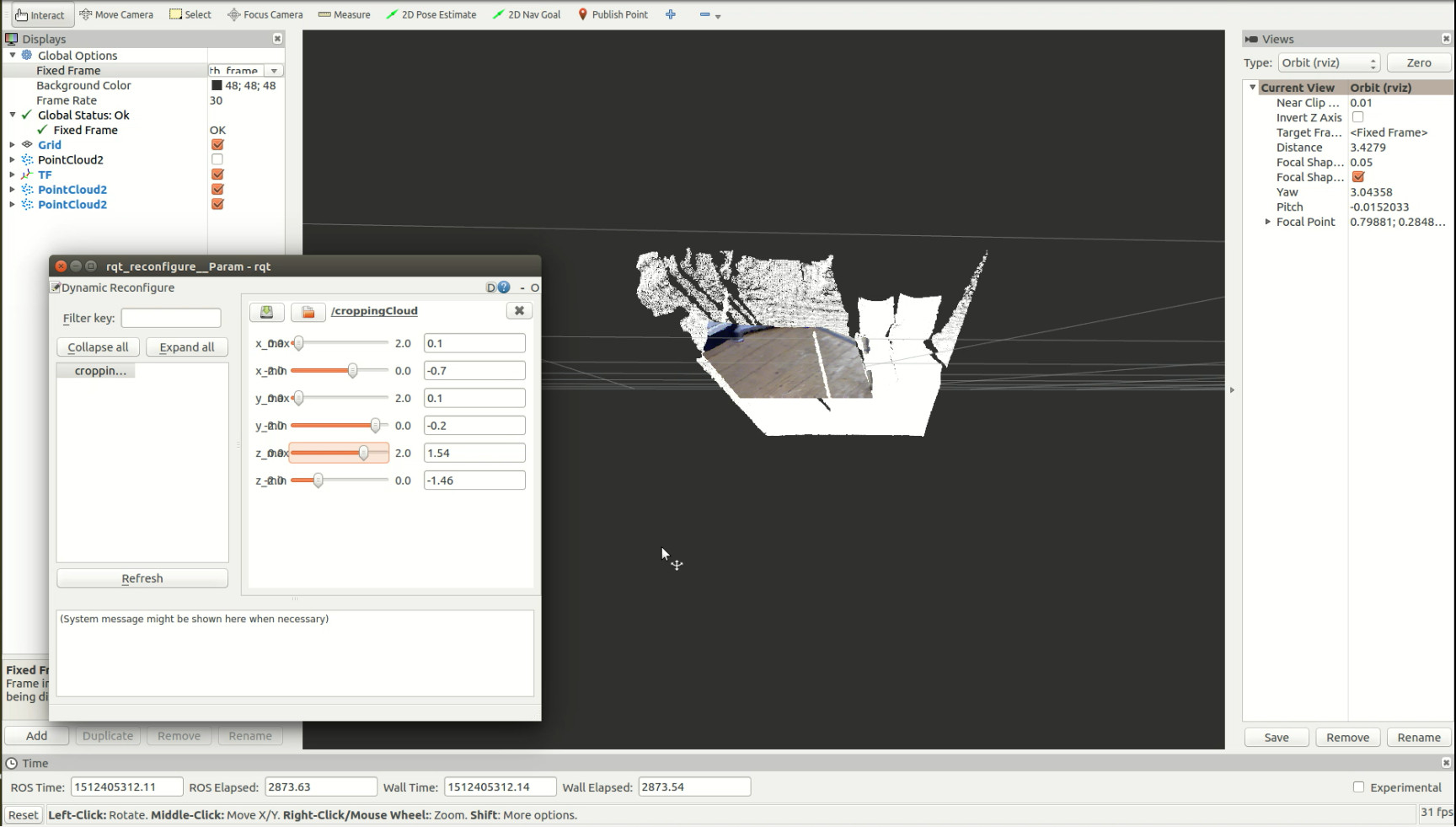
This ROS package enables you to crop the scene from Kinect (input topic type: PCL pointcloud). You can even enable fitting a plane to remove the ground from the scene and by adjusting correct parameter you can get the desired object from the scene. code available on my Github.

Dear Sir, I tried to implement this but the file “cropping_pointcloud/croppingCloudConfig.h” is not present in the github. This is causing error. How can I find the file?
Hi, thanks for your comment, This header should get generated automatically, compile the project twice, and it should be there. Cheers