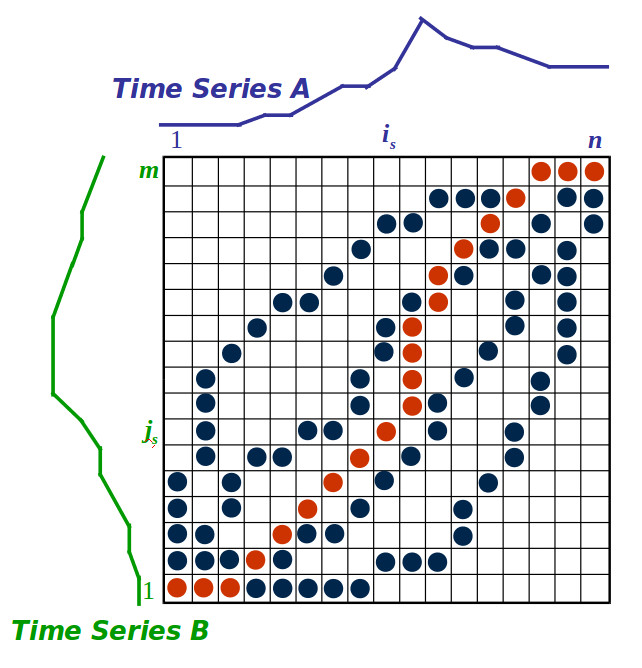
Dynamic Time Warping (DTW) is a method to align two sequences under certain constraints. For instance, two trajectories that are very similar but one of them performed in a longer time. The alignment should be is such way that minimizes the distance between these two sequences. Here I have done DTW between two-time series with python. I found a good c++ library for Fast Dynamic Time Warping and I developed my wrapper to make a ROS package for that. Here you can download my code at GitHub.
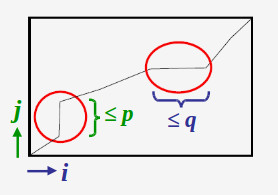
- monotonicity: The alignment path does not go back in “time” index.
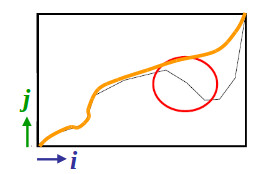
The image is taken from [1] - continuity: The alignment path does not jump in “time” index.
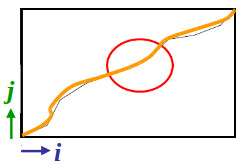
The image is taken from [1] - boundary conditions: The alignment path starts at the bottom left and ends at the top right.
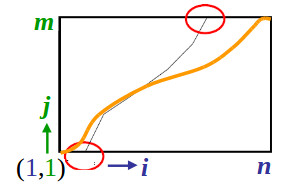
The image is taken from [1]. - warping window: A good alignment path is unlikely to wander too far from the diagonal.
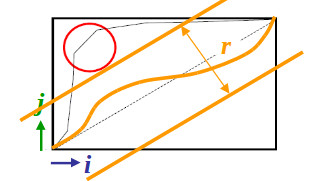
The image is taken from [1]. - slope constraint: The alignment path should not be too steep or too shallow.
The image is taken from [1]. - References: [1]

References: [1]
