registration is aligning 3D point cloud on each other such that it gives you a complete model. To achieve this, you need to find the relative positions and orientations of each point cloud, such that you maximize the overlapping intersecting areas between them [1].
So I got the idea from here and I implemented a software based on that. In the following, you can see the main idea and the step I took and finally the results:
Main Flowchart of pairwise point cloud registration
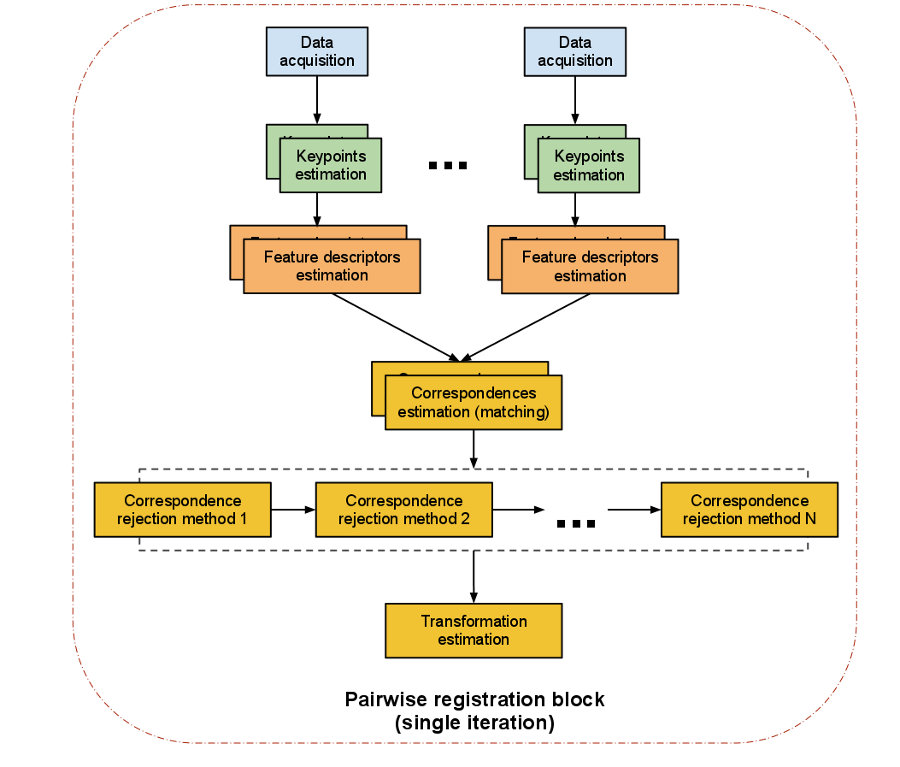
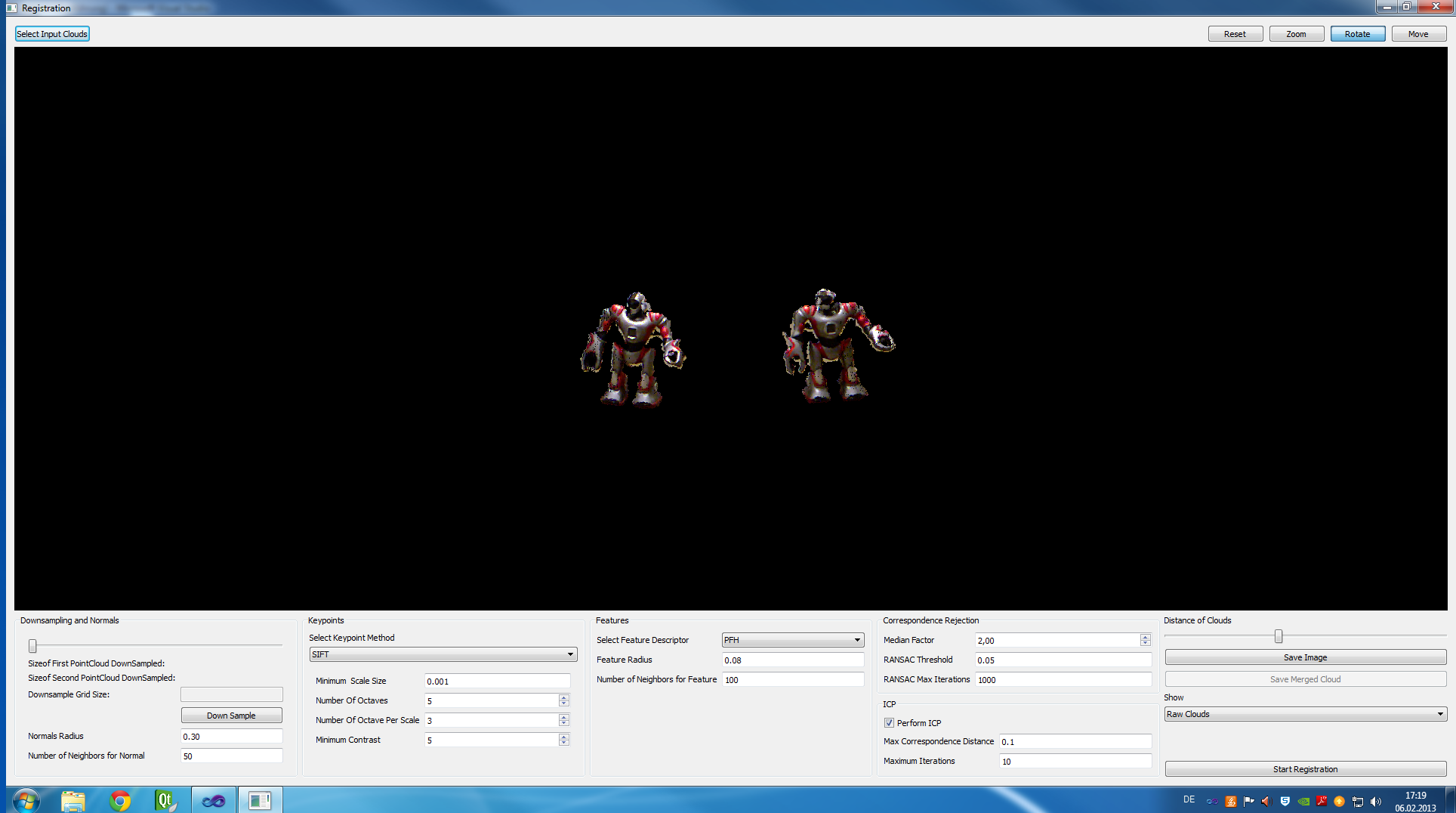
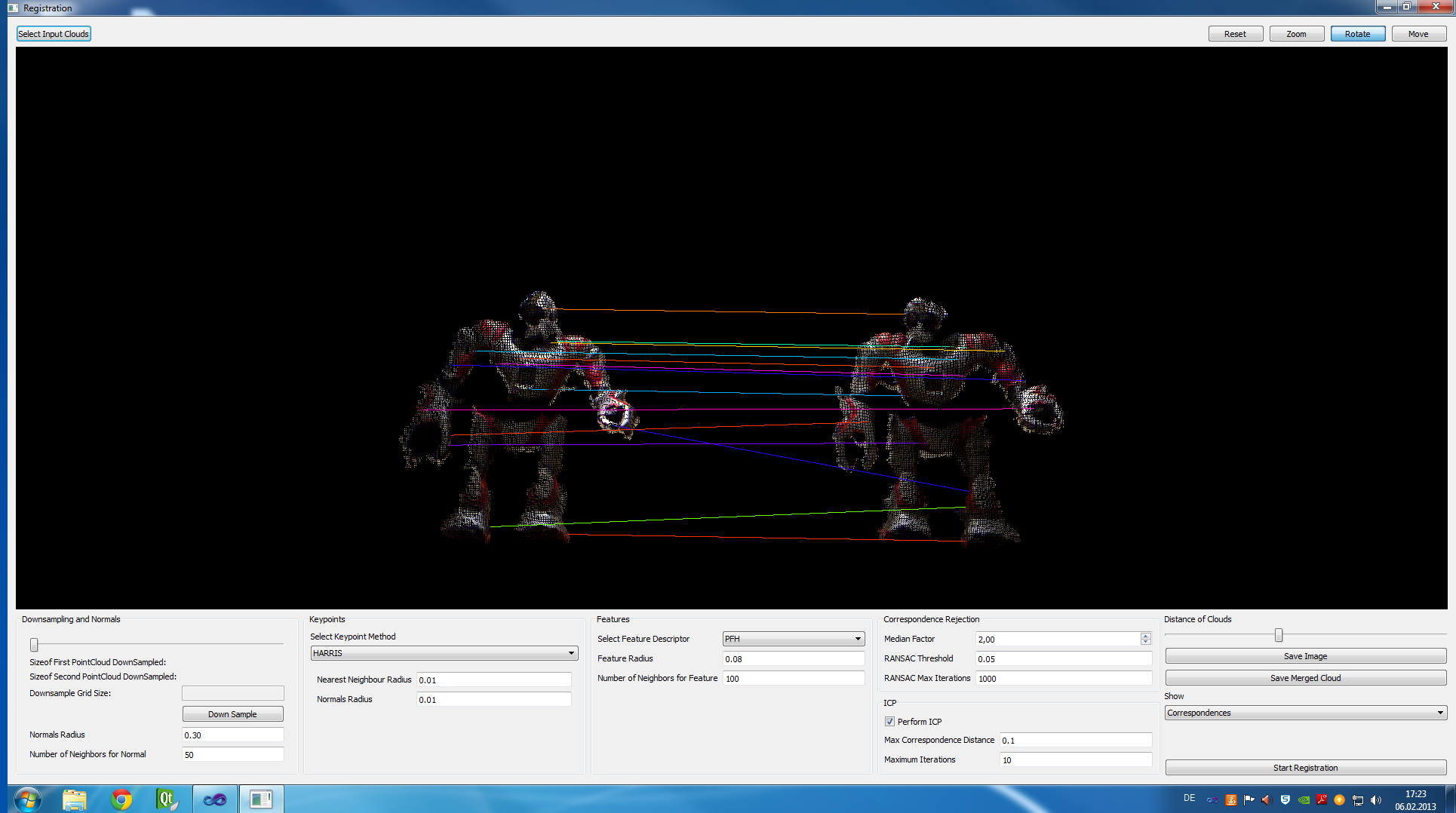
1)Importing point cloud acquired from different angles, down sampling, selecting keypoint extractor method SIFT, NARF, Harris, SUSAN and respected parameters
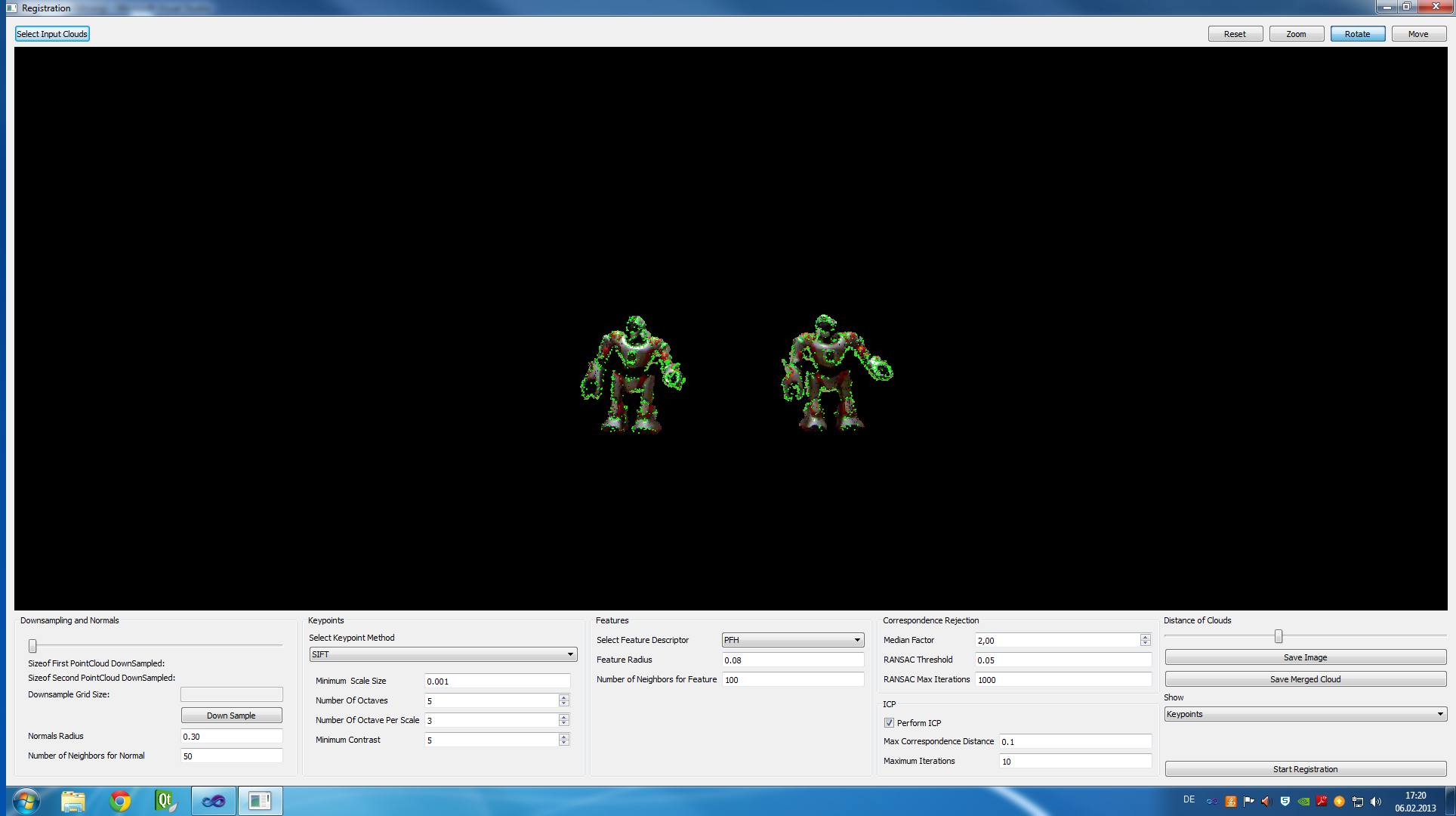
2)Selected keypoints are highlighted in green, for each keypoint a descriptor (PFH or FPFH) is estimated
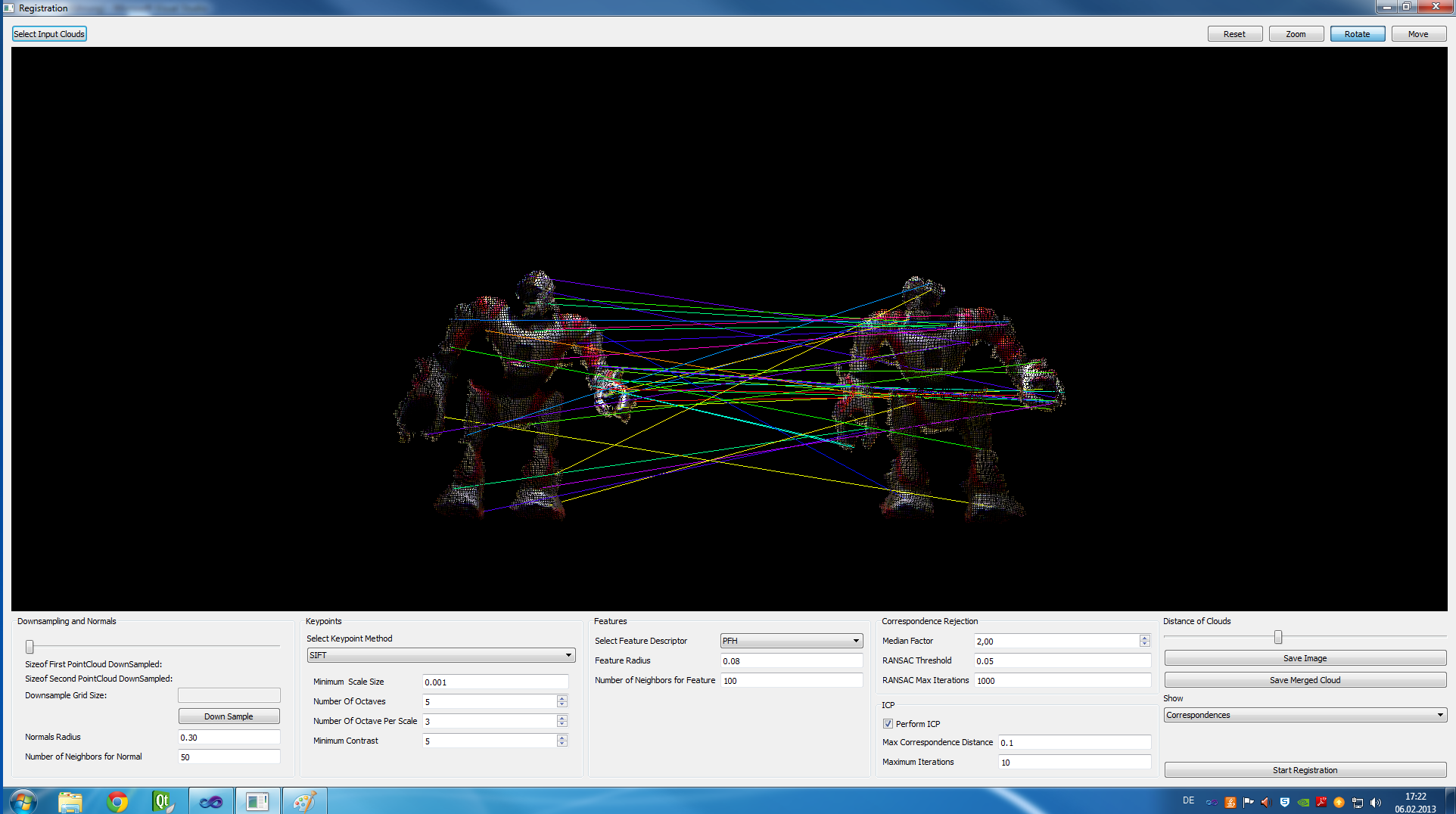
3) Correspondences between keypoint descriptor are estimated (histogram distance) and correspondent points are connected.
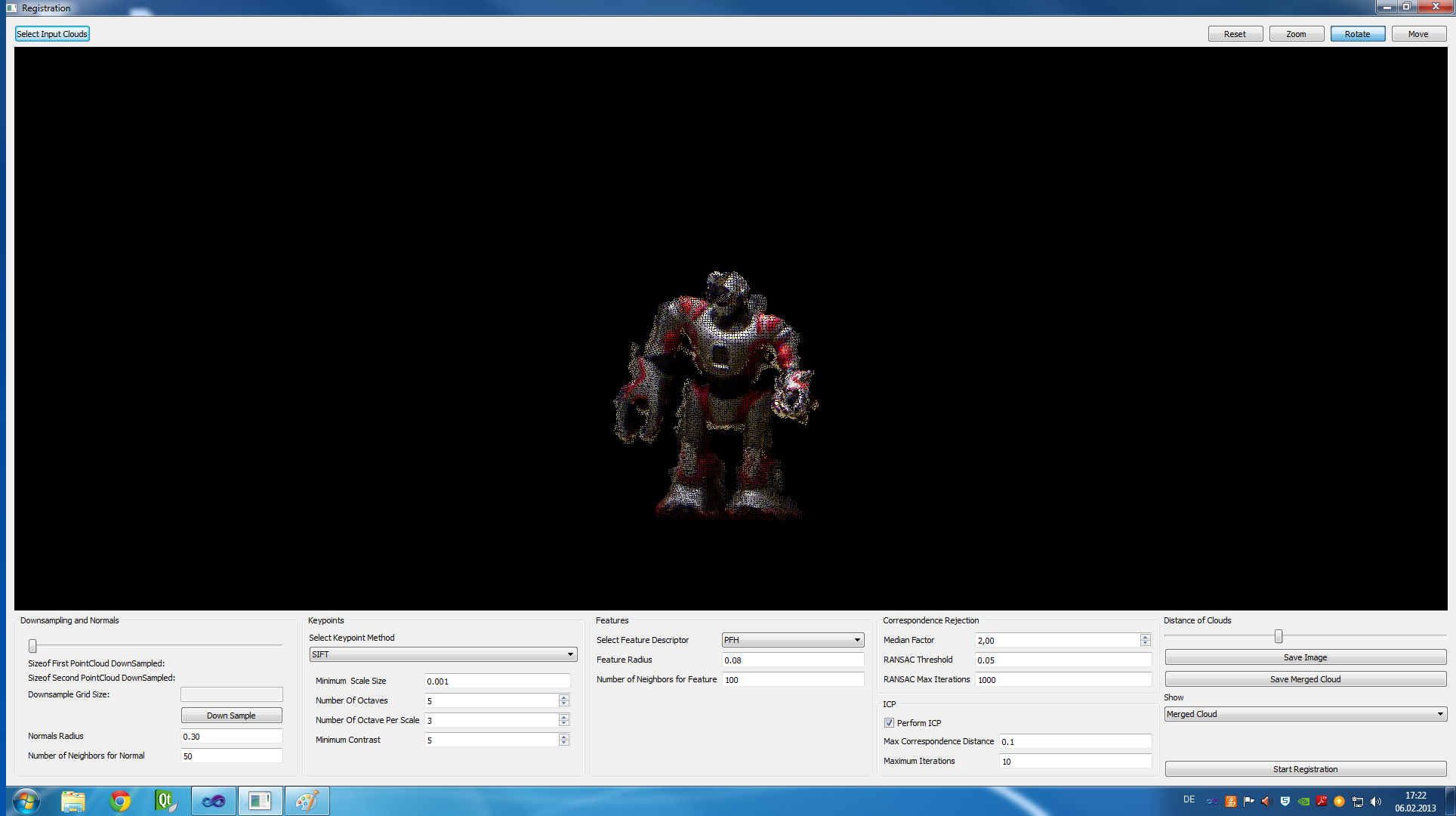
4) Correspondent points are rejected via several algorithm and from the remained correspondent points a 4×4 transformation matrix is computed
5) 4×4 transformation matrix is used for initial estimation of ICP algorithm and two point clouds are merged into one

Hey, very nice this implementation. Im trying to do something like that. Would you mind to help me? Or send and example code
Thanks